Subsection 2.4.1 隐函数求导法
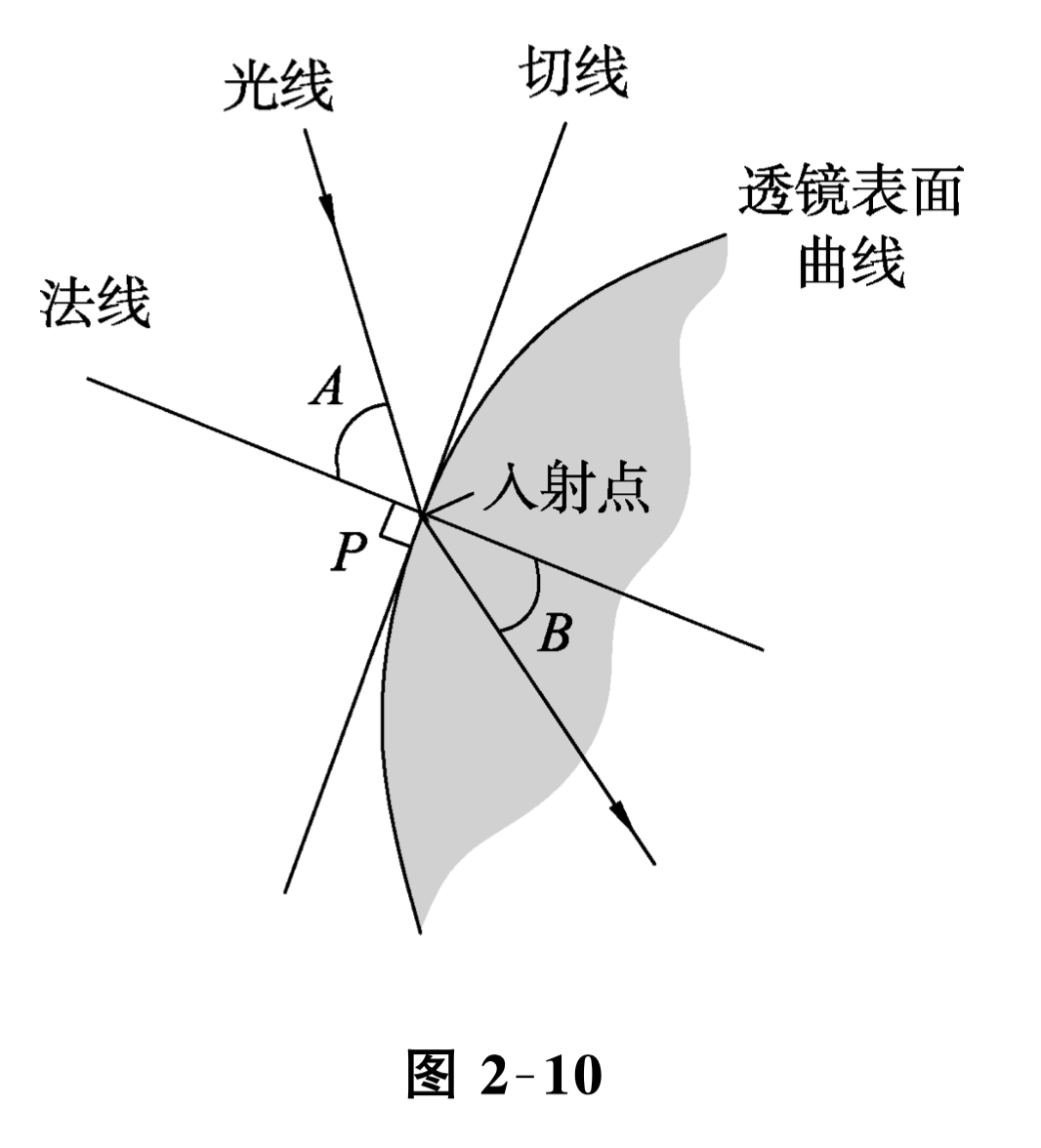
在描述光线进人透镜时如何改变其方向的定律中, 最重要的因素是光线在人射点处与透镜表面垂直的直线之间的角度 (如图 2-10 中的角 \(A\) 和 \(B\) ). 这条直线称为人射点处曲面的法线, 即垂直于人射点处表面曲线的切线的直线.
透镜的表面曲线常常由形如 \(F(x, y)=0\)的方程来描述. 为求表面曲线上一点处的法线,应首先通过计算 \(y^{\prime}\) 以求得切线的斜率. 但是如果不能将该方程写成 \(y=f(x)\) 形式, 那又将如何求导呢?
在函数关系中,若因变量 \(y\) 能用自变量的式子明显地表示出来, 如 \(y=x^{2}+\sin x, y=\ln x+\mathrm{e}^{3 x}\text{,}\) \(f(x)=\left\{\begin{array}{ll}x^{2}, & x>0, \\ \cos x, & x \leqslant 0\end{array}\right.\) 等, 则这种函数称为显函数. 有时因变量 \(y\) 与自变量 \(x\) 的关系是由一个方程 \(F(x, y)=0\) 所确定的.
若存在一个定义在某区间上的函数 \(y=f(x)\text{,}\) 使 \(F[x, f(x)] \equiv 0\text{,}\)则称 \(y=f(x)\) 是由方程 \(F(x, y)=0\) 所确定的隐函数.
有些隐函数可以从方程中将 \(y\) 解出, 使之成为显函数, 即这种函数可以显式化,如从方程 \(3 x+y-1=0, x^{2}+y^{2}=1\) 中可以分别求出 \(y=-3 x+1, y= \pm \sqrt{1-x^{2}}\text{,}\)使隐函数显式化. 但有的隐函数难以化为显函数, 有的不可能化为显函数, 如方程 \(\mathrm{e}^{x y}+x y+x+y-1=0\text{,}\) \(\sin (x y)+\ln \left(x+y^{2}\right)+1=0\) 等分别确定了 \(y\) 是 \(x\) 的隐函数,但不能显式化.
在什么条件下, 由方程 \(F(x, y)=0\) 能确定 \(y\) 是 \(x\) 的隐函数? 如果能够确定 \(y\)是 \(x\) 的隐函数, 那么这个隐函数又具有哪些性质? 隐函数的连续性、可导性等将在多元函数微分学中加以讨论. 假设方程 \(F(x, y)=0\) 已确定了 \(y\) 是 \(x\) 的隐函数,并且是可导的,这里只讨论如何求它的导数的问题.
假设方程 \(F(x, y)=0\) 确定了 \(y\) 是 \(x\) 的隐函数 \(y=f(x)\text{,}\) 即有 \(F[x, f(x)] \equiv 0\text{,}\)并且 \(y=f(x)\) 可导. 为了求出 \(y^{\prime}\text{,}\) 利用复合函数求导数的原理, 只需将方程 \(F(x, y)=0\) 两端对 \(x\) 求导, 并注意到 \(y\) 是 \(x\) 的函数, 得到含 \(y^{\prime}\) 的方程, 将其中的 \(y^{\prime}\) 解出, 便得所求隐函数的导数.
Example 2.4.1.
例 1 设由方程 \(\mathrm{e}^{x y}+x y+x+y-1=0\) 所确定的隐函数 \(y=y(x)\text{,}\) 求 \(y^{\prime},\left.y^{\prime}\right|_{x=0}\text{.}\)
Solution.
解 方程两边对 \(x\) 求导, 注意到 \(y\) 是 \(x\) 的函数, \(\mathrm{e}^{x y}\) 是复合函数, 由复合函数求导法则, 有
\begin{equation*}
\begin{gathered}
\mathrm{e}^{x y}\left(y+x y^{\prime}\right)+y+x y^{\prime}+1+y^{\prime}=0, \\
\text{即} \hspace{1cm} \left(x \mathrm{e}^{x y}+x+1\right) y^{\prime}=-\left(y \mathrm{e}^{x y}+y+1\right), \\
\text{所以}\hspace{1.5cm} y^{\prime}=-\frac{y \mathrm{e}^{x y}+y+1}{x \mathrm{e}^{x y}+x+1} .
\end{gathered}
\end{equation*}
当 \(x=0\) 时, \(y=0\text{,}\) 从而 \(\left.y^{\prime}\right|_{x=0}=-1\text{.}\)
Technology 2.4.2. 隐函数图像.
Example 2.4.3.
例2 设由方程 \(\sin (x y)+\ln \left(x+y^{2}\right)-1=0\) 所确定的隐函数 \(y=y(x)\text{,}\) 求 \(y^{\prime}\text{.}\)
Solution.
解 方程两边对 \(x\) 求导, 得
\begin{equation*}
\cos (x y)\left(y+x y^{\prime}\right)+\frac{1}{x+y^{2}}\left(1+2 y y^{\prime}\right)=0
\end{equation*}
所以
\begin{equation*}
\left[x \cos (x y)+\frac{2 y}{x+y^{2}}\right] y^{\prime}=-\left[y \cos (x y)+\frac{1}{x+y^{2}}\right]
\end{equation*}
即
\begin{equation*}
y^{\prime}=-\frac{y \cos (x y)+\frac{1}{x+y^{2}}}{x \cos (x y)+\frac{2 y}{x+y^{2}}}=-\frac{\left(x+y^{2}\right) y \cos (x y)+1}{\left(x+y^{2}\right) x \cos (x y)+2 y} .
\end{equation*}
Example 2.4.4.
例 3 求由方程 \(x y+\ln y=1\) 所确定的函数 \(y=f(x)\) 在点 \(M(1,1)\) 处的切线方程.
Solution.
解 方程两边对 \(x\) 求导, 得
解得
\begin{equation*}
\begin{gathered}
y+x y^{\prime}+\frac{1}{y} y^{\prime}=0, \\
y^{\prime}=-\frac{y^{2}}{x y+1} .
\end{gathered}
\end{equation*}
在点 \(M(1,1)\) 处, \(\left.y^{\prime}\right|_{\substack{x=1 \\ y=1}}=-\frac{1^{2}}{1 \times 1+1}=-\frac{1}{2}\text{.}\)
于是, 在点 \(M(1,1)\) 处的切线方程为 \(y-1=-\frac{1}{2}(x-1)\text{,}\) 即 \(x+2 y-3=0\text{.}\)
Example 2.4.5.
例 4 设由方程 \(\mathrm{e}^{x}-\mathrm{e}^{y}=x y\) 所确定的隐函数 \(y=y(x)\text{,}\) 求 \(\left.y^{\prime \prime}\right|_{x=0}\text{.}\)
Solution.
解 方程两边对 \(x\) 求导, 得
\begin{equation*}
\mathrm{e}^{x}-\mathrm{e}^{y} y^{\prime}=y+x y^{\prime},
\end{equation*}
所以
\begin{equation*}
y^{\prime}=\frac{\mathrm{e}^{x}-y}{\mathrm{e}^{y}+x}
\end{equation*}
两边再对 \(x\) 求导,注意到 \(y\) 是 \(x\) 的函数,得
\begin{equation*}
y^{\prime \prime}=\left(\frac{\mathrm{e}^{x}-y}{\mathrm{e}^{y}+x}\right)^{\prime}=\frac{\left(\mathrm{e}^{x}-y^{\prime}\right)\left(\mathrm{e}^{y}+x\right)-\left(\mathrm{e}^{x}-y\right)\left(\mathrm{e}^{y} y^{\prime}+1\right)}{\left(\mathrm{e}^{y}+x\right)^{2}} .
\end{equation*}
当 \(x=0\) 时,由原方程知 \(y=0\text{.}\)
由一阶导数知, \(\left.y^{\prime}\right|_{x=0}=1\text{,}\) 将 \(\left.y\right|_{x=0}=0,\left.y^{\prime}\right|_{x=0}=1\) 代人二阶导数式, 得
\begin{equation*}
\left.y^{\prime \prime}\right|_{x=0}=-2
\end{equation*}
解此题时也可以在方程两端对 \(x\) 连续求导两次解出 \(y^{\prime \prime}\text{.}\)
Subsection 2.4.2 取对数求导法
到目前为止, 求函数的导数一般情况下不再用导数的定义,而是利用求导的各种法则及导数的基本公式,但形如 \(y=[\varphi(x)]^{\psi(x)}\) 的幂指函数却在基本公式中找不出其类型. 为此, 根据隐函数求导法, 给出一种取对数求导运算的方法, 这种方法也适用于多个因子的乘、除、乘方、开方等运算构成的比较复杂的函数的求导,这种方法称为取对数求导法.
下面通过具体的例题来说明这种方法.
Example 2.4.6.
例 5 求函数 \(y=x^{x}(x>0)\) 的导数.
Solution.
解 方程两边取对数,得 \(\ln y=x \ln x\text{,}\)
两边对 \(x\) 求导,得
所以
\begin{equation*}
\begin{aligned}
& \frac{1}{y} y^{\prime}=\ln x+x \cdot \frac{1}{x}=1+\ln x, \\
& y^{\prime}=y(1+\ln x)=x^{x}(1+\ln x) .
\end{aligned}
\end{equation*}
一般地,对于幂指函数 \(y=[\varphi(x)]^{\psi(x)}\text{,}\) 只要其中 \(\varphi, \psi\) 可导, \(\varphi(x)>0\text{,}\) 都可以用对数求导法求导.
当然,也可以先将其变形,即
\begin{equation*}
y=[\varphi(x)]^{\psi(x)}=\mathrm{e}^{\ln [\varphi(x)]^{\psi(x)}}=\mathrm{e}^{\psi(x) \ln [\varphi(x)]},
\end{equation*}
然后用复合函数求导法求出 \(y^{\prime}\text{.}\)
Example 2.4.7.
例 6 设方程 \((\cos y)^{x}=(\sin x)^{y}\text{,}\) 求 \(y^{\prime}\text{.}\)
Solution.
解 方程两端取对数,得
\begin{equation*}
x \ln \cos y=y \ln \sin x .
\end{equation*}
等式两边对 \(x\) 求导, 得
\begin{equation*}
\begin{gathered}
\ln \cos y-x \frac{\sin y}{\cos y} y^{\prime}=y^{\prime} \ln \sin x+y \frac{\cos x}{\sin x}, \\
y^{\prime}=\frac{\ln \cos y-y \cot x}{x \tan y+\ln \sin x} .
\end{gathered}
\end{equation*}
Example 2.4.8.
例 7 求 \(y=\sqrt[4]{\frac{x(x-1)}{\sqrt[3]{x-2}}}\) 的导数.
Solution.
解 方程两边取对数 (假定 \(x>2\) ), 有
\begin{equation*}
\ln y=\frac{1}{4}\left[\ln x+\ln (x-1)-\frac{1}{3} \ln (x-2)\right] .
\end{equation*}
两边对 \(x\) 求导,得
\begin{equation*}
\frac{1}{y} y^{\prime}=\frac{1}{4}\left(\frac{1}{x}+\frac{1}{x-1}-\frac{1}{3} \cdot \frac{1}{x-2}\right),
\end{equation*}
因此, \(y^{\prime}=\frac{1}{4} y\left(\frac{1}{x}+\frac{1}{x-1}-\frac{1}{3} \cdot \frac{1}{x-2}\right)=\frac{1}{4} \sqrt[4]{\frac{x(x-1)}{\sqrt[3]{x-2}}}\left[\frac{1}{x}+\frac{1}{x-1}-\frac{1}{3(x-2)}\right]\text{.}\)
在函数定义域的其他区间,利用同样的方法可得与上面相同的结果.
Subsection 2.4.3 由参数方程所确定的函数的求导法
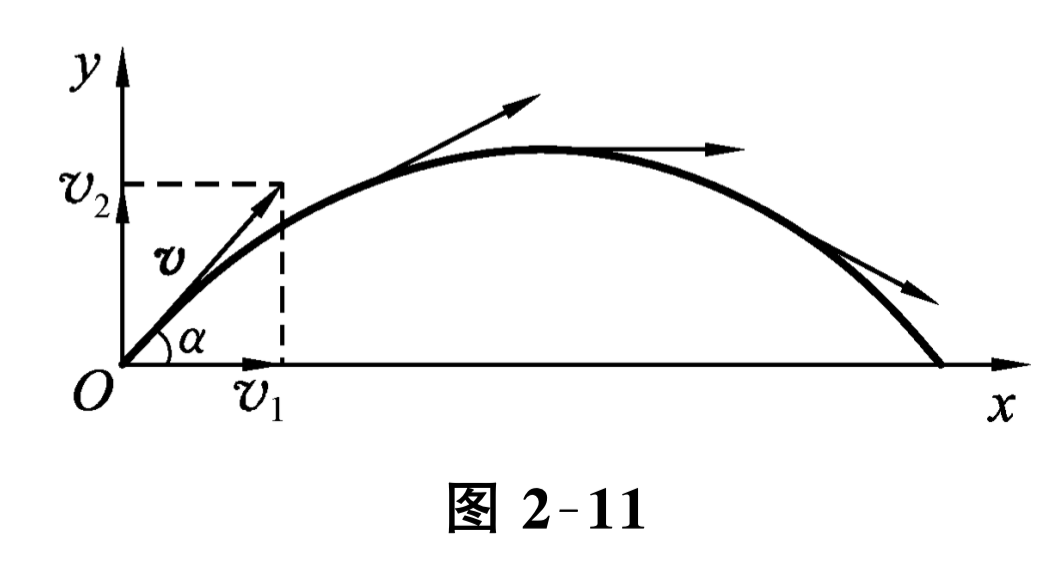
在实际问题中,因变量和自变量有时会通过第三个变量相互联系, 即 \(y=f(x)\)中的 \(y\) 和 \(x\) 之间的关系由 \(\left\{\begin{array}{l}x=\varphi(t), \\ y=\psi(t)\end{array}(\alpha \leqslant t \leqslant \beta)\right.\) 给出, 其中 \(t\) 称为参变量. 例如, 研究抛射体的运动问题时, 若空气阻力忽略不计, 则抛射体的运动轨迹可表示为
\begin{equation}
\left\{\begin{array}{l}
x=v_{1} t \\
y=v_{2} t-\frac{1}{2} g t^{2}
\end{array}\right.\tag{2.4.1}
\end{equation}
其中 \(v_{1}, v_{2}\) 分别是抛射体初速度的水平、铅直分量, \(g\) 是重力加速度, \(t\) 是飞行时间, \(x\) 和 \(y\) 分别是飞行中抛射体在铅直平面上的位置的横坐标和纵坐标 (见图 2-11).
在
(2.4.1)中,
\(x, y\) 都与
\(t\) 存在函数关系. 如果将对应于同一个
\(t\) 值的
\(y\) 与
\(x\) 的值看作是一一对应的, 就得到
\(y\) 与
\(x\) 的函数关系. 消去参数
\(t\text{,}\) 有
\(y=\frac{v_{2}}{v_{1}} x-\frac{g}{2 v_{1}^{2}} x^{2}\text{.}\) 这是因变量
\(y\) 与自变量
\(x\) 直接联系的关系式, 也是参数方程
(2.4.1)所确定的函数的显式表示.
一般地, 由参数方程
\begin{equation}
\left\{\begin{array}{l}
x=\varphi(t), \quad(\alpha \leqslant t \leqslant \beta) \\
y=\psi(t)
\end{array}\right.\tag{2.4.2}
\end{equation}
所确定的 \(y\) 与 \(x\) 之间的函数, 称为由参数方程所确定的函数, 有时也称为参量函数.
Technology 2.4.9. 画参数方程图形.
如何求出由参数方程所确定的函数的导数? 当然, 如果能将 \(y\) 直接表成 \(x\) 的函数 \(y=f(x)\text{,}\) 就可求得导数 \(y^{\prime}=f^{\prime}(x)\text{.}\) 例如, 由参数方程
\begin{equation*}
\left\{\begin{array}{l}
x=t \\
y=t^{2}
\end{array} \quad(-\infty<t<+\infty)\right.
\end{equation*}
确定函数 \(y=x^{2}\text{,}\) 得 \(y^{\prime}=2 x\text{.}\)
但有时很难消去参数或者消去参数后的表达式 \(y=f(x)\) 比较复杂, 这样求导数会有不少困难,因此希望通过参数方程本身来求它所确定的函数的导数.
假设
(2.4.2)中,
\(x=\varphi(t), y=\psi(t)\) 都可导, 且
\(\varphi^{\prime}(t) \neq 0\) 及
\(x=\varphi(t)\) 有单调的反 函数
\(t=\varphi^{-1}(x)\text{,}\) 将其代人
\(y=\psi(t)\) 有
\begin{equation*}
y=\psi\left[\varphi^{-1}(x)\right]=f(x),
\end{equation*}
于是由复合函数求导法则, 有
\begin{equation*}
\frac{\mathrm{d} y}{\mathrm{~d} x}=\frac{\mathrm{d} y}{\mathrm{~d} t} \cdot \frac{\mathrm{d} t}{\mathrm{~d} x}
\end{equation*}
由反函数的求导法可得
\begin{equation*}
\frac{\mathrm{d} t}{\mathrm{~d} x}=\frac{1}{\frac{\mathrm{d} x}{\mathrm{~d} t}}=\frac{1}{\varphi^{\prime}(t)}
\end{equation*}
因此
\begin{equation}
\frac{\mathrm{d} y}{\mathrm{~d} x}=\frac{\mathrm{d} y}{\mathrm{~d} t} \cdot \frac{1}{\frac{\mathrm{d} x}{\mathrm{~d} t}}=\frac{\psi^{\prime}(t)}{\varphi^{\prime}(t)} .\tag{2.4.3}
\end{equation}
若 \(x=\varphi(t), y=\psi(t)\) 具有二阶导数, 则按照参数方程确定的函数的导数计算法则, 因为 \(\frac{\mathrm{d} y}{\mathrm{~d} x}=\frac{\psi^{\prime}(t)}{\varphi^{\prime}(t)}\) 仍为 \(t\) 的函数, 所以 \(\frac{\mathrm{d}^{2} y}{\mathrm{~d} x^{2}}\) 仍可视为参数方程求导,
\begin{equation*}
\frac{\mathrm{d}^{2} y}{\mathrm{~d} x^{2}}=\frac{\frac{\mathrm{d}}{\mathrm{d} t}\left(\frac{\mathrm{d} y}{\mathrm{~d} x}\right)}{\frac{\mathrm{d} x}{\mathrm{~d} t}}=\frac{\frac{\mathrm{d}}{\mathrm{d} t}\left[\frac{\psi^{\prime}(t)}{\varphi^{\prime}(t)}\right]}{\varphi^{\prime}(t)}=\frac{\varphi^{\prime}(t) \psi^{\prime \prime}(t)-\psi^{\prime}(t) \varphi^{\prime \prime}(t)}{\varphi^{\prime 2}(t)} \cdot \frac{1}{\varphi^{\prime}(t)}
\end{equation*}
即
\begin{equation}
\frac{\mathrm{d}^{2} y}{\mathrm{~d} x^{2}}=\frac{\varphi^{\prime}(t) \psi^{\prime \prime}(t)-\psi^{\prime}(t) \varphi^{\prime \prime}(t)}{\varphi^{\prime 3}(t)}\tag{2.4.4}
\end{equation}
同理, 若 \(\varphi(t), \psi(t)\) 具有三阶导数时, 可求出 \(\frac{\mathrm{d}^{3} y}{\mathrm{~d} x^{3}}=\frac{\frac{\mathrm{d}}{\mathrm{d} t}\left(\frac{\mathrm{d}^{2} y}{\mathrm{~d} x^{2}}\right)}{\frac{\mathrm{d} x}{\mathrm{~d} t}}\text{.}\)
Example 2.4.10.
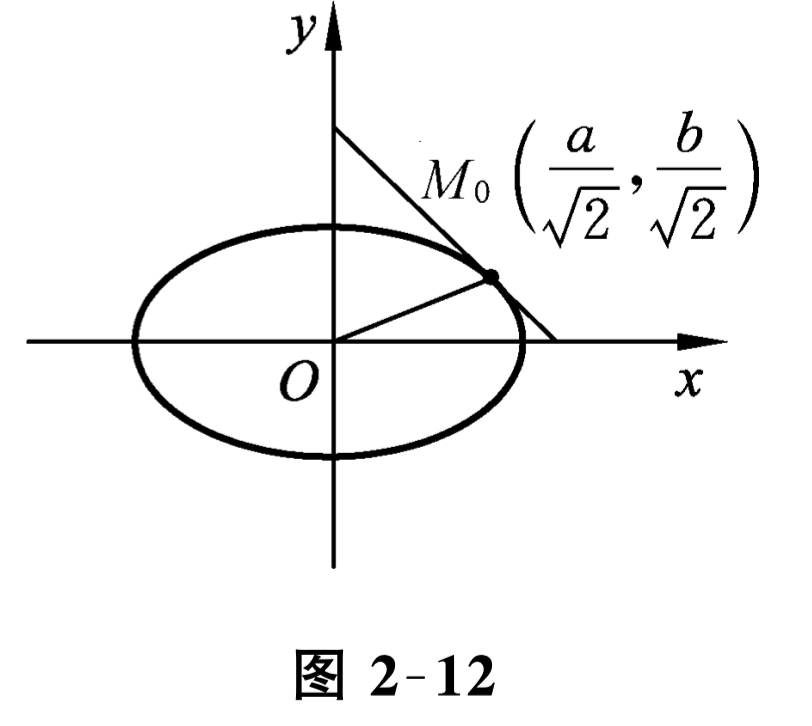
例 8 求椭圆 \(\left\{\begin{array}{l}x=a \cos t, \\ y=b \sin t\end{array} \quad(0 \leqslant t \leqslant 2 \pi)\right.\) 在 \(t=\frac{\pi}{4}\) 相应的点处的切线方程 (见图 2-12).
Solution.
解 当 \(t=\frac{\pi}{4}\) 时, 椭圆上点 \(M_{0}\) 处的坐标 \(\left(x_{0}, y_{0}\right)\) 为
\begin{equation*}
x_{0}=a \cos \frac{\pi}{4}=\frac{a}{\sqrt{2}}, y_{0}=b \sin \frac{\pi}{4}=\frac{b}{\sqrt{2}} .
\end{equation*}
曲线在点 \(M_{0}\) 处切线的斜率为
\begin{equation*}
\frac{\mathrm{d} y}{\mathrm{~d} x}=\left.\frac{(b \sin t)^{\prime}}{(a \cos t)^{\prime}}\right|_{t=\frac{\pi}{4}}=\left.\frac{b \cos t}{-a \sin t}\right|_{t=\frac{\pi}{4}}=-\frac{b}{a} .
\end{equation*}
因此, 椭圆上点 \(M_{0}\) 处的切线方程为
\begin{equation*}
\begin{gathered}
y-\frac{b}{\sqrt{2}}=-\frac{b}{a}\left(x-\frac{a}{\sqrt{2}}\right), \\
b x+a y-\sqrt{2} a b=0 .
\end{gathered}
\end{equation*}
Example 2.4.11.
例 9 证明星形线 \(\left\{\begin{array}{l}x=a \cos ^{3} t, \\ y=a \sin ^{3} t\end{array}(a>0)(\right.\) 除坐标轴上的点外) 的切线被坐标轴所截的线段为定长 (见图 2-13).
Solution.
解 对应于参数 \(t\text{,}\) 星形线上点 \(M\) 处的坐标为 \(\left(a \cos ^{3} t, a \sin ^{3} t\right)\text{.}\)
曲线在点 \(M\) 处的切线斜率为
\begin{equation*}
\frac{\mathrm{d} y}{\mathrm{~d} x}=\frac{\left(a \sin ^{3} t\right)^{\prime}}{\left(a \cos ^{3} t\right)^{\prime}}=\frac{3 a \sin ^{2} t \cos t}{-3 a \cos ^{2} t \sin t}=-\tan t,
\end{equation*}
切线方程为
\begin{equation*}
y-a \sin ^{3} t=-\tan t\left(x-a \cos ^{3} t\right) .
\end{equation*}
令 \(y=0\text{,}\) 得切线在 \(x\) 轴上的截距为
\begin{equation*}
x(t)=a \cos ^{3} t+a \sin ^{2} t \cos t=a \cos t,
\end{equation*}
令 \(x=0\text{,}\) 得切线在 \(y\) 轴上的截距为
\begin{equation*}
y(t)=a \sin ^{3} t+a \cos ^{2} t \sin t=a \sin t,
\end{equation*}
故切线被坐标轴所截的线段长度为
\begin{equation*}
s=\sqrt{x^{2}(t)+y^{2}(t)}=\sqrt{a^{2} \cos ^{2} t+a^{2} \sin ^{2} t}=a(\text { 常数 }) .
\end{equation*}
Example 2.4.12.
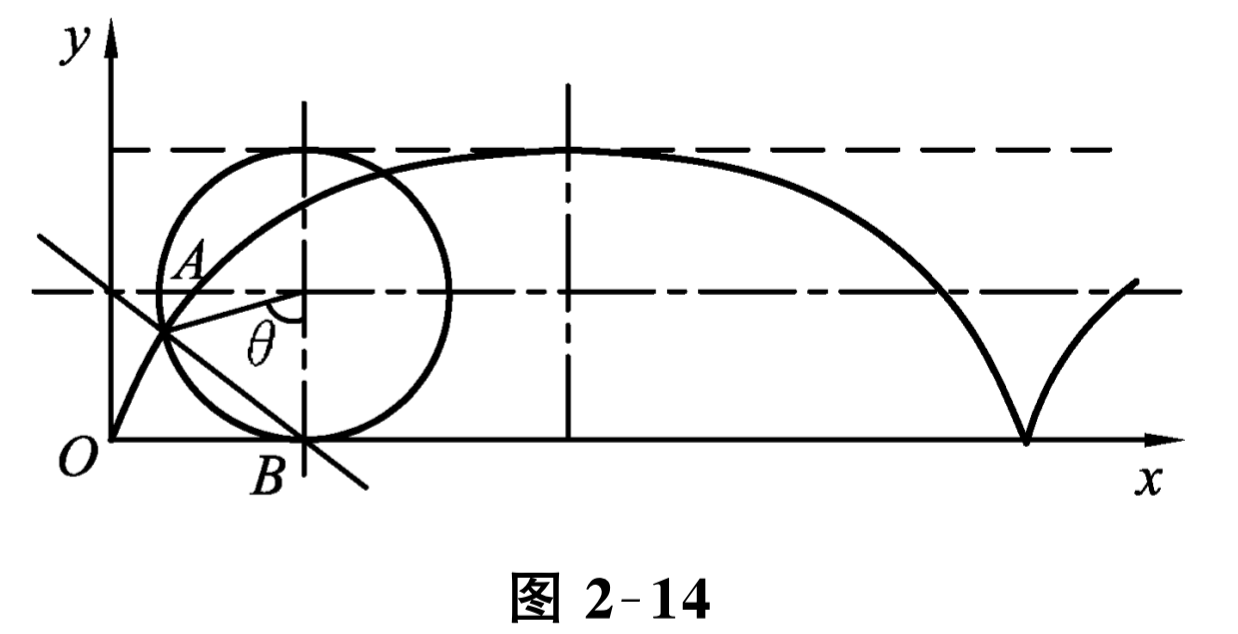
例 10 设半径为 \(a\) 的动圆在 \(x\) 轴上无滑动地滚动, \(A\) 是圆周上的一个定点,开始时点 \(A\) 在原点 \(O\) 处,设参变量为 \(\theta\) (见图 2-14), 则 \(A\) 点的轨迹方程为
\begin{equation*}
\left\{\begin{array}{l}
x=a(\theta-\sin \theta) \\
y=a(1-\cos \theta)
\end{array}\right.
\end{equation*}
该曲线称为摆线 (或旋轮线). 证明摆线上任一点 \(A(x, y)\) 处的法线必通过动圆与 \(x\) 轴相切的切点 \(B\text{.}\)
Solution.
证 摆线在 \(A(x, y)\) 处切线的斜率为
\begin{equation*}
\frac{\mathrm{d} y}{\mathrm{~d} x}=\frac{[a(1-\cos \theta)]^{\prime}}{[a(\theta-\sin \theta)]^{\prime}}=\frac{\sin \theta}{1-\cos \theta}
\end{equation*}
法线的斜率为 \(-\frac{1-\cos \theta}{\sin \theta}\text{,}\) 于是法线方程为
\begin{equation*}
y-a(1-\cos \theta)=-\frac{1-\cos \theta}{\sin \theta}[x-a(\theta-\sin \theta)] .
\end{equation*}
令 \(y=0\text{,}\)解出法线与 \(x\) 轴交点的横坐标为
\begin{equation*}
x=a(\theta-\sin \theta)+a(1-\cos \theta) \frac{\sin \theta}{1-\cos \theta}=a \theta,
\end{equation*}
而点 \(B\) 的横坐标为 \(O B=\overparen{A B}=a \theta\text{,}\) 故摆线在点 \(A(x, y)\) 处的法线通过点 \(B\text{.}\)
Example 2.4.13.
例 11 设 \(y=y(x)\) 由参数方程 \(\left\{\begin{array}{l}x=\ln \left(1+t^{2}\right), \\ y=\arctan t\end{array}\right.\) 所确定, 求 \(\frac{\mathrm{d}^{2} y}{\mathrm{~d} x^{2}}, \frac{\mathrm{d}^{3} y}{\mathrm{~d} x^{3}}\text{.}\)
Solution.
解 \(\frac{\mathrm{d} y}{\mathrm{~d} x}=\frac{y^{\prime}(t)}{x^{\prime}(t)}=\frac{\frac{1}{1+t^{2}}}{\frac{2 t}{1+t^{2}}}=\frac{1}{2 t}\text{,}\)
\begin{equation*}
\begin{aligned}
\frac{\mathrm{d}^{2} y}{\mathrm{~d} x^{2}} & =\frac{\mathrm{d}}{\mathrm{d} t}\left(\frac{\mathrm{d} y}{\mathrm{~d} x}\right) \cdot \frac{\mathrm{d} t}{\mathrm{~d} x}=\frac{\left(\frac{1}{2 t}\right)^{\prime}}{\left[\ln \left(1+t^{2}\right)\right]^{\prime}}=\frac{-\frac{1}{2 t^{2}}}{\frac{2 t}{1+t^{2}}}=-\frac{1+t^{2}}{4 t^{3}}, \\
\frac{\mathrm{d}^{3} y}{\mathrm{~d} x^{3}} & =\frac{\mathrm{d}}{\mathrm{d} t}\left(\frac{\mathrm{d}^{2} y}{\mathrm{~d} x^{2}}\right) \cdot \frac{\mathrm{d} t}{\mathrm{~d} x}=\frac{-\frac{1}{4}\left(\frac{1}{t^{3}}+\frac{1}{t}\right)^{\prime}}{\left[\ln \left(1+t^{2}\right)\right]^{\prime}}=-\frac{\frac{1}{4}\left(\frac{-3}{t^{4}}-\frac{1}{t^{2}}\right)}{\frac{2 t}{1+t^{2}}} \\
& =\frac{\left(1+t^{2}\right)\left(3+t^{2}\right)}{8 t^{5}}=\frac{3+4 t^{2}+t^{4}}{8 t^{5}} .
\end{aligned}
\end{equation*}
Example 2.4.14.
例 12 设 \(\left\{\begin{array}{l}x=t \mathrm{e}^{t}, \\ \mathrm{e}^{t}+\mathrm{e}^{y}=2,\end{array}\right.\) 求 \(\left.\frac{\mathrm{d}^{2} y}{\mathrm{~d} x^{2}}\right|_{t=0}\text{.}\)
Solution.
解 由 \(x_{t}^{\prime}=\mathrm{e}^{t}(t+1)\) 及 \(\mathrm{e}^{t}+\mathrm{e}^{y} y_{t}^{\prime}=0\text{,}\) 得 \(y_{t}^{\prime}=-\mathrm{e}^{t-y}\text{,}\)
则
\begin{equation*}
\begin{gathered}
\frac{\mathrm{d} y}{\mathrm{~d} x}=\frac{y_{t}^{\prime}}{x_{t}^{\prime}}=\frac{-\mathrm{e}^{t-y}}{\mathrm{e}^{t}(1+t)}=\frac{-\mathrm{e}^{-y}}{1+t}, \\
\frac{\mathrm{d}^{2} y}{\mathrm{~d} x^{2}}=\left(-\frac{\mathrm{e}^{-y}}{1+t}\right)_{t}^{\prime} \cdot \frac{1}{x_{t}^{\prime}}=\frac{-1\left[-\mathrm{e}^{-y} y_{t}^{\prime}(1+t)-\mathrm{e}^{-y}\right]}{(1+t)^{2} \cdot \mathrm{e}^{t}(t+1)} .
\end{gathered}
\end{equation*}
当 \(t=0\) 时, \(x=0, y=0\text{,}\)
\begin{equation*}
\begin{aligned}
& \left.x_{t}^{\prime}\right|_{t=0}=\left.\mathrm{e}^{t}(t+1)\right|_{t=0}=1, \\
& \left.y_{t}^{\prime}\right|_{t=0}=-\left.\mathrm{e}^{t-y}\right|_{t=0}=-1,
\end{aligned}
\end{equation*}
所以
\begin{equation*}
\left.\frac{\mathrm{d}^{2} y}{\mathrm{~d} x^{2}}\right|_{t=0}=\frac{-1[-1(-1) \cdot 1-1]}{1^{2} \cdot 1 \cdot 1}=0 .
\end{equation*}